WP5 Year 2 report: contribution of CNRS-INT (Institut de Neurosciences de la Timone)
During the first year of BrainScaleS, we have concentrated on disseminating our work on the role of motion-based prediction in motion detection. This led to a publication on the hypothesis that this prior expectation may explain some phenomena explained otherwise by complex arrangements of mechanisms, namely that motion-based prediction is sufficient to solve the aperture problem (Perrinet and Masson, 2012). During the second year, we extended this hypothesis to other types of problems linked to the detection of motion. In particular, we focused on the case were the stimulus is transiently and unexpectedly blanked, a physiologically very relevant constraint occurring for instances during blinks of the eye. For this, we have used the same theoretical framework based on a Bayesian formulation and implemented using a particle filtering scheme, but used a different experimental protocol inspired by behavioral experiments conducted in the laboratory by CNRS-INT (Bogadhi, 2012). This is an important aspect as it allows to better understand the dynamics of the neural representation without sensory input and more generally to understand the interaction of the sensory flow with an internal neural representation of the environment.
|
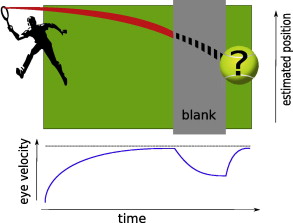
Our results indicate that motion-based prediction is sufficient to predict eye responses during the blank and ---more importantly--- the dynamics of eye movements at the reappearance of the object. We compared simulations of the motion-based predictive framework to a dot moving in a straight trajectory which is transiently blanked, with a framework where prediction is limited to the velocity domain but is not anisotropically transported also in the position domain. This comparison allowed to show that at the reappearance of the object, instead of just resuming, the estimation of the position and velocity in the motion-based prediction framework catches-up the error that may have accumulated during the blank (see Figure). We have put in evidence that this phenomenon is only present when the system converged to a "tracking state", a phase transition that we first saw in our first study (Perrinet and Masson, 2012) and that we studied systematically here. Furthermore, we give some predictions as how the oculomotor response should respond to the same protocol when visual input is perturbed by noise, an experiment that has still not been performed behaviorally, and that could confirm the validity of our probabilistic framework. These results have been submitted for publication (Khoei, Masson and Perrinet).
From this novel step, we wish to further study the role of prediction on focusing on the neural implementation of these processes. Indeed, the framework that we used so far used an abstract, probabilistic framework. However, it is known to map well to a neural architecture such as those developed in BrainScaleS at the modeling and hardware levels. Such a venture was initiated in collaboration between CNRS-INT and KTH by Bernhard Kaplan and we could give a sufficient large-scale network of spiking neurons that could efficiently implement such algorithms. Our plan is to resume this work in more generic conditions. One objective is to apply it to different modalities,for instance to the somatosensory system (collaboration with Dan Shulz, CNRS-UNIC). Also, we wish to implement a model which is specifically more realistically accounting for the properties of the primary visual cortex of primates and the interaction this area may have with higher order areas. A post-doctoral student was selected in year 2 to work on that issue in Years 3 and 4. The ultimate goal of this work will be to have a pyNN-compatible network that implements a realistic model of motion detection. This network will be tested in light of the synthetic textures that we have generated (Sanz et al. 2012, see WP4 task 1) and that we recently used to disentangle the different read-outs that may be used by perception or action (Simoncini et al., 2012). The use of neuromorphic hardware will then be crucial to explore the configuration space of such large-scale networks implementing motion detection.
Laurent U. Perrinet and Guillaume S. Masson. Motion-based prediction is sufficient to solve the aperture problem. Neural Computation, 24(10):2726--50, 2012
Mina A. Khoei, Guillaume S. Masson and Laurent U. Perrinet. Role of motion-based prediction in motion extrapolation. Submitted.
Paula S. Leon, Ivo Vanzetta, Guillaume S. Masson and Laurent U. Perrinet. Motion Clouds: Model-based stimulus synthesis of natural-like random textures for the study of motion perception Journal of Neurophysiology, 107(11):3217--3226, 2012
Claudio Simoncini, Laurent U. Perrinet, Anna Montagnini, Pascal Mamassian and Guillaume S. Masson. More is not always better: dissociation between perception and action explained by adaptive gain control Nature Neuroscience, 2012