| Laurent Perrinet (https://laurentperrinet.github.io) [2024-09-09] Enjeux pour l'IA embarquée |  |
|---|
AgileNeuRobot: Fiche d’identité
- Titre : Robots aériens agiles bio-mimetiques pour le vol en conditions réelles
- Title : Bio-mimetic agile aerial robots flying in real-life conditions
- CES : CE23 - Intelligence Artificielle (ANR-20-CE23-0021)
- Durée: 4 ans, du 1er Octobre 2021 au 30 Septembre 2025
- Budget total: 435 k€
AgileNeuRobot: Consortium:
| Stéphane Viollet | Ryad Benosman | Laurent Perrinet |
| Julien Diperi | Sio-Hoï Ieng | Emmanuel Daucé |
| Post-doc 1 | Post-doc 2 | PhD (JN Jérémie) |
| Inst Sciences Mouvement | Inst de la Vision | Inst Neurosci de la Timone |
AgileNeuRobot: Agile = Performant et efficace
Enjeux de l’IA embarquée : latence de réponse
![Visual latencies [[Grimaldi *et al*, 2022]](https://laurentperrinet.github.io/publication/grimaldi-22-polychronies/)](https://github.com/SpikeAI/2022_polychronies-review/raw/main/figures/visual-latency.jpg)
Enjeux de l’IA embarquée : budget énergétique

Levier #1: Réseaux de neurones impulsionnels (SNNs)
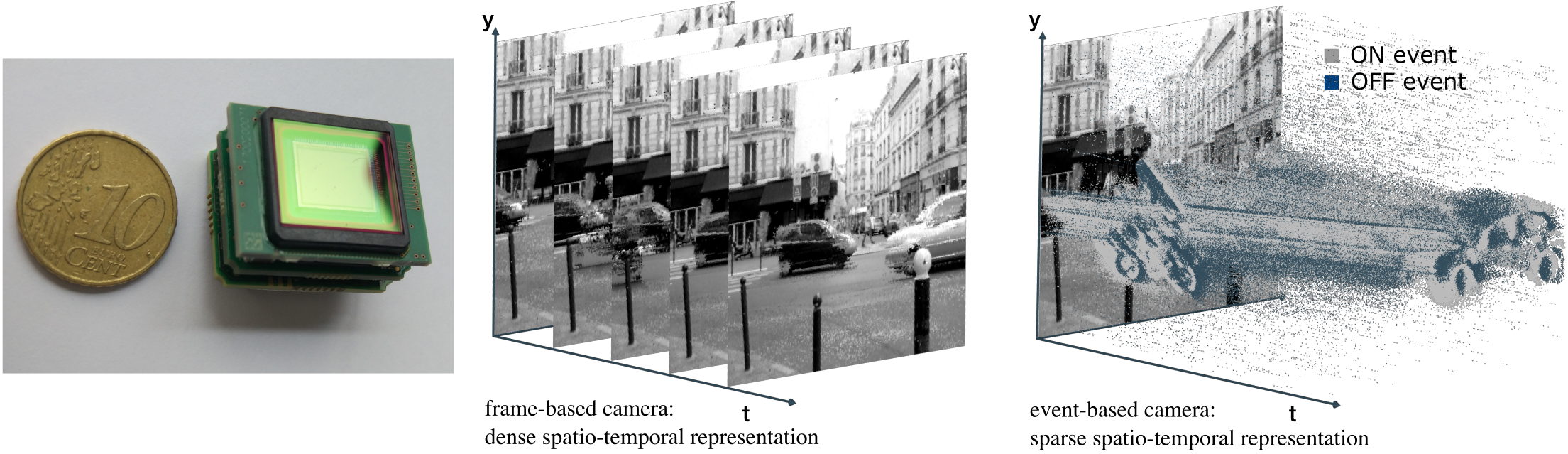
Levier #1: Réseaux de neurones impulsionnels (SNNs)
| Sensor | Range | Framerate | Resolution | Power |
|---|---|---|---|---|
| Human eye | 60 (?) dB | 300 (?) fps | 100 (?) Mpx | 10 mW |
| DSLR | 44.6 dB | 120 fps | 2–20 Mpx | 30 W |
| Ultra-high speed | 64 dB | 10^4 fps | 0.3–4 Mpx | 300 W |
| Event-based | 120 dB | 10^6 fps | 0.1–2 Mpx | 30 mW |
Levier #1: Réseaux de neurones impulsionnels (SNNs)
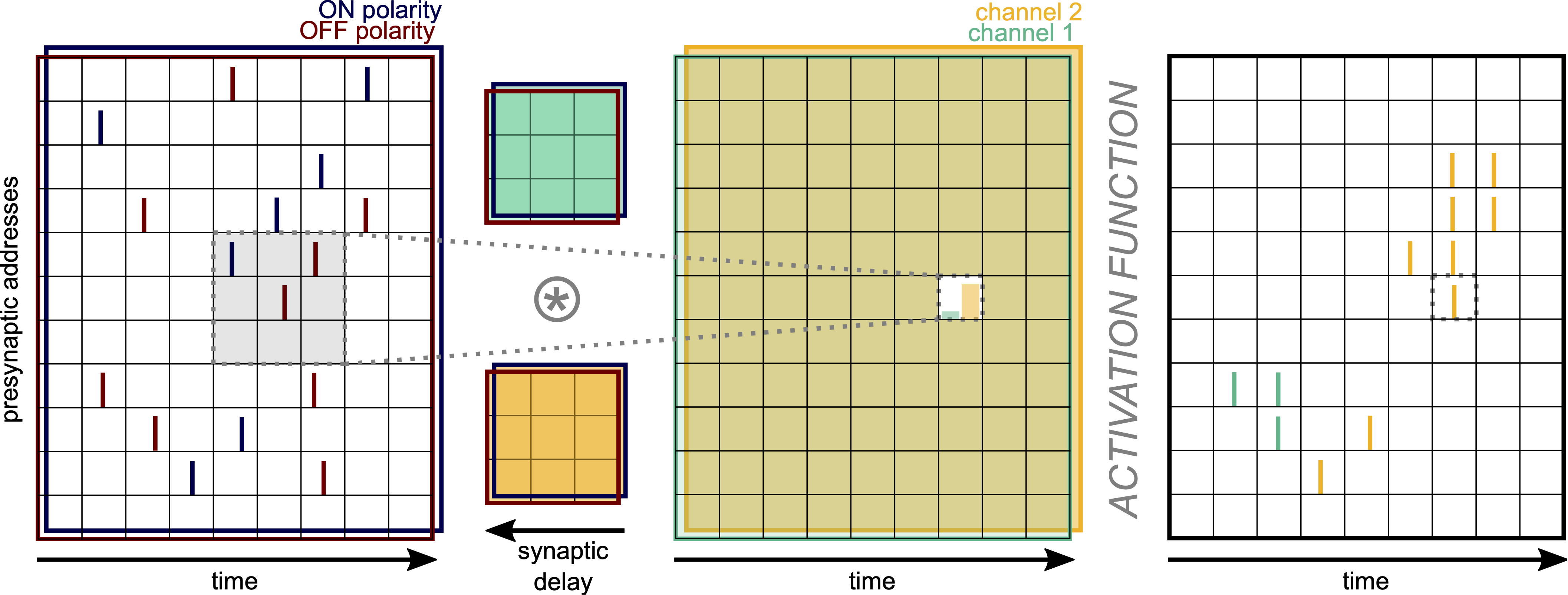
![The HD-SNN neural network [[Grimaldi *et al*, 2023]](https://laurentperrinet.github.io/publication/grimaldi-23-bc/)](https://github.com/SpikeAI/2022_polychronies-review/raw/main/figures/izhikevich.png)
Levier #1: Réseaux de neurones impulsionnels (SNNs)
![The HD-SNN neural network [[Grimaldi *et al*, 2023]](https://laurentperrinet.github.io/publication/grimaldi-23-bc/)](https://laurentperrinet.github.io/publication/grimaldi-23-bc/accuracy.png)
Time-to-Contact maps [Nunes et al, 2023]
Levier #2: Vision active / Active Vision
]](https://laurentperrinet.github.io/publication/jeremie-24-ccn/featured.png)
Levier #2: Vision active / Active Vision
]](https://laurentperrinet.github.io/publication/jeremie-25/featured.jpg)
Levier #2: Vision active / Active Vision
]](https://laurentperrinet.github.io/publication/jeremie-25/fig_attack_rotation_imagenet.png)
Levier #2: Vision active / Active Vision
]](https://laurentperrinet.github.io/publication/jeremie-25/fig_areadne.png)
| Laurent Perrinet (https://laurentperrinet.github.io) [2024-09-09] Enjeux pour l'IA embarquée | |
|---|