Réseaux de neurones artificiels et apprentissage machine appliqués à la compréhension de la vision
Laurent Perrinet
[2022-03-23] Master 1 Neurosciences et Sciences Cognitives

Principes de la Vision
À quoi sert la vision?
](https://www.cabinetmagazine.org/issues/30/cabinet_030_archibald_sasha_001.jpg)
À quoi sert la vision?
](https://www.cabinetmagazine.org/issues/30/cabinet_030_archibald_sasha_002.jpg)
À quoi sert la vision?
](https://www.cabinetmagazine.org/issues/30/cabinet_030_archibald_sasha_003.jpg)
À quoi sert la vision?
](https://www.cabinetmagazine.org/issues/30/cabinet_030_archibald_sasha_006.jpg)
Les illusions visuelles
](https://laurentperrinet.github.io/2022-01-12_NeuroCercle/figures/Hering_illusion_without.svg)
Les illusions visuelles
](https://laurentperrinet.github.io/2022-01-12_NeuroCercle/figures/Hering_illusion.svg)
Les illusions visuelles
Les illusions visuelles
](https://laurentperrinet.github.io/2022-01-12_NeuroCercle/figures/42_rotsnakes_main.jpg)
Les illusions visuelles : Paréidolie
](https://laurentperrinet.github.io/2022-01-12_NeuroCercle/figures/Face-on-mars.jpg)
Les illusions visuelles : Paréidolie
](https://laurentperrinet.github.io/2022-01-12_NeuroCercle/figures/Viking_moc_face_20m_low.png)
Les illusions visuelles : Paréidolie
](https://laurentperrinet.github.io/2022-01-12_NeuroCercle/figures/Viking_moc_face_20m_high.png)
Les neurosciences computationnelles
]](https://github.com/laurentperrinet/2019-04-03_a_course_on_vision_and_modelization/raw/master/figures/Churchland92.png)
De V1 aux réseaux convolutionnels
Le système visuel
](https://upload.wikimedia.org/wikipedia/commons/e/e4/Voies_visuelles3.svg)
Le cortex visuel primaire
![[Hubel & Wiesel, 1962]](https://github.com/laurentperrinet/2019-04-03_a_course_on_vision_and_modelization/raw/master/figures/scientists.jpg)
Hubel & Wiesel
[Hubel & Wiesel, 1962]
Réseaux convolutionnels : hiérarchie
]](https://laurentperrinet.github.io/2019-04-03_a_course_on_vision_and_modelization/figures/boutin-franciosini-ruffier-perrinet-19_figure1_a.svg)
Réseaux convolutionnels : Math
- Convolution discrète uni-dimensionnelle (eg dans le temps) avec un noyau f de rayon $K$: $$ (f \ast g)[n]=\sum_{m=-K}^{K} f[m] g[n-m] $$
Réseaux convolutionnels : Math
- Convolution discrète d’une image (bi-dimensionnelle):
$$ (f \ast g)[x, y] = \sum_{i=-K}^{K} \sum_{j=-K}^{K} f[i, j] g[i-x, j-y] $$
Réseaux convolutionnels : l’opération de convolution
]](https://stanford.edu/~shervine/teaching/cs-230/illustrations/convolution-layer-a.png?1c517e00cb8d709baf32fc3d39ebae67)
Réseaux convolutionnels : Math
- Convolution discrète d’une image sur plusieurs canaux de sortie:
$$ (f \ast g)[x, y, k] = \sum_{i=-K}^{K} \sum_{j=-K}^{K} f[k, i, j, k] g[i-x, j-y] $$
Réseaux convolutionnels : Math
- Convolution discrète d’une image multi-canaux (eg. RGB) sur plusieurs canaux de sortie (noter l’ordre des indices):
$$ (f \ast g)[x, y, k] = \ \sum_{i=-K}^{K} \sum_{j=-K}^{K} \sum_{c=1}^{C} f[k, c, i, j] g[i-x, j-y, c] $$
Réseaux convolutionnels : CNN
]](https://stanford.edu/~shervine/teaching/cs-230/illustrations/architecture-cnn-fr.jpeg)
Mise en pratique: détecter & apprendre
Tutoriel Apprentissage profond
Perspectives
Réseaux convolutionnels : hiérarchie
Réseaux prédictifs
]](https://laurentperrinet.github.io/2019-04-03_a_course_on_vision_and_modelization/figures/boutin-franciosini-ruffier-perrinet-19_figure1.svg)
Topographie dans V1
![[Bosking *et al*, 1997]](https://github.com/laurentperrinet/2019-04-03_a_course_on_vision_and_modelization/raw/master/figures/Bosking97Fig4.jpg)
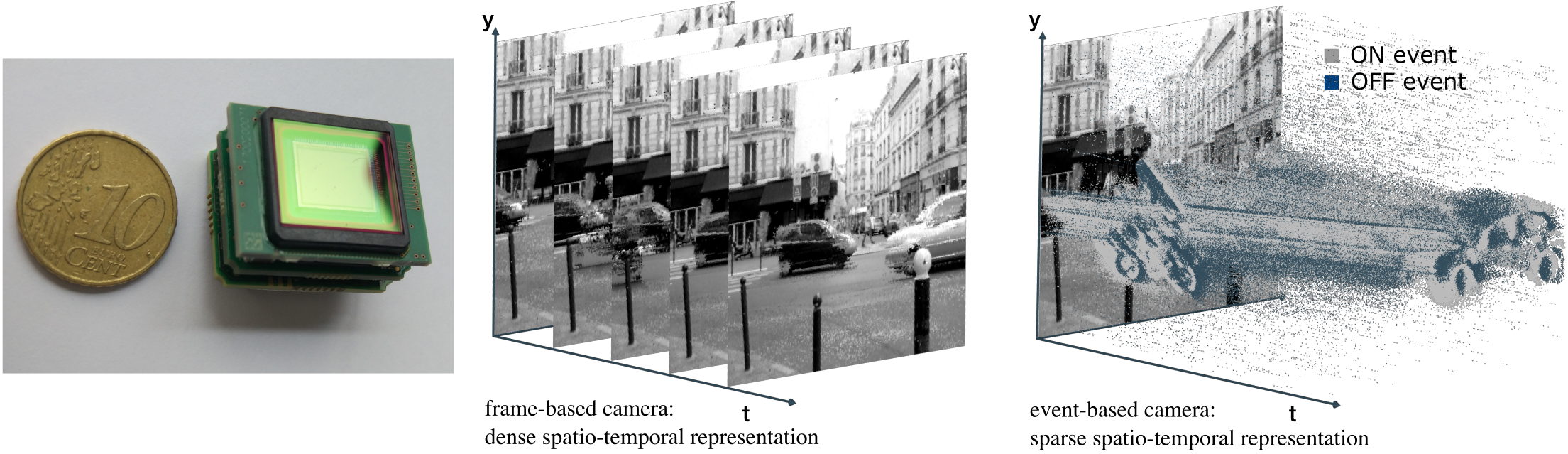
Spiking Neural Networks
Recurrent processing
]](https://stanford.edu/~shervine/teaching/cs-230/illustrations/architecture-rnn-ltr.png)
Dynamique de la vision
![[[Thorpe (2001)]](https://laurentperrinet.github.io/2022-01-12_NeuroCercle/#/2/1)](https://laurentperrinet.github.io/2022-01-12_NeuroCercle/figures/scheme_thorpe.jpg)
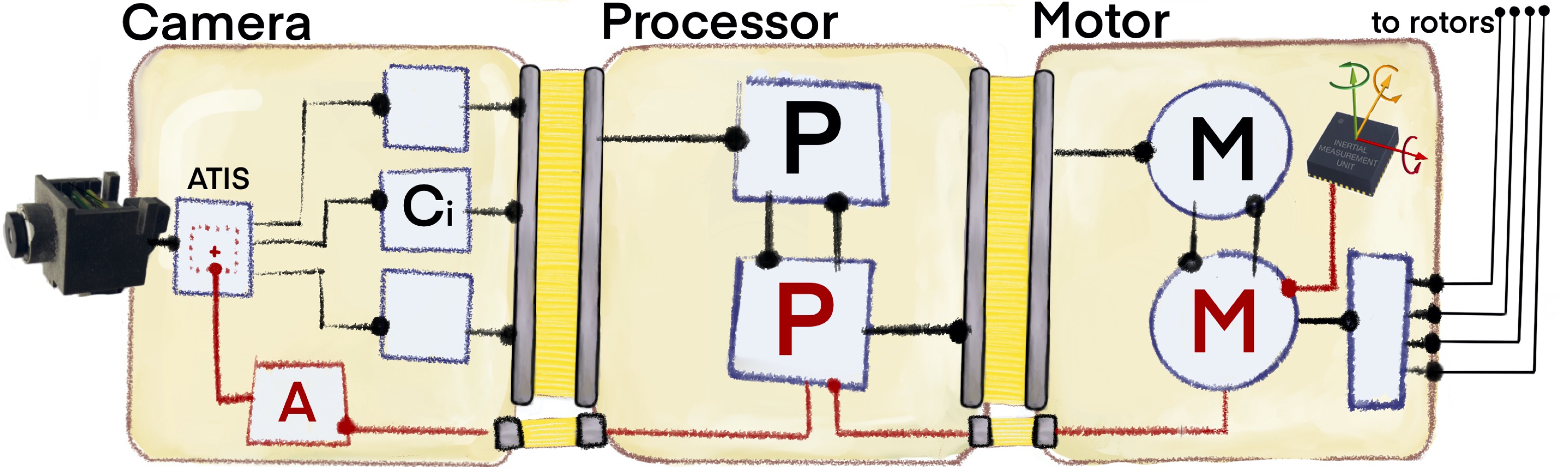
Applications robotiques
Questions?
Ask info @ laurent.perrinet@univ-amu.fr
More info @ web-site