Abstract
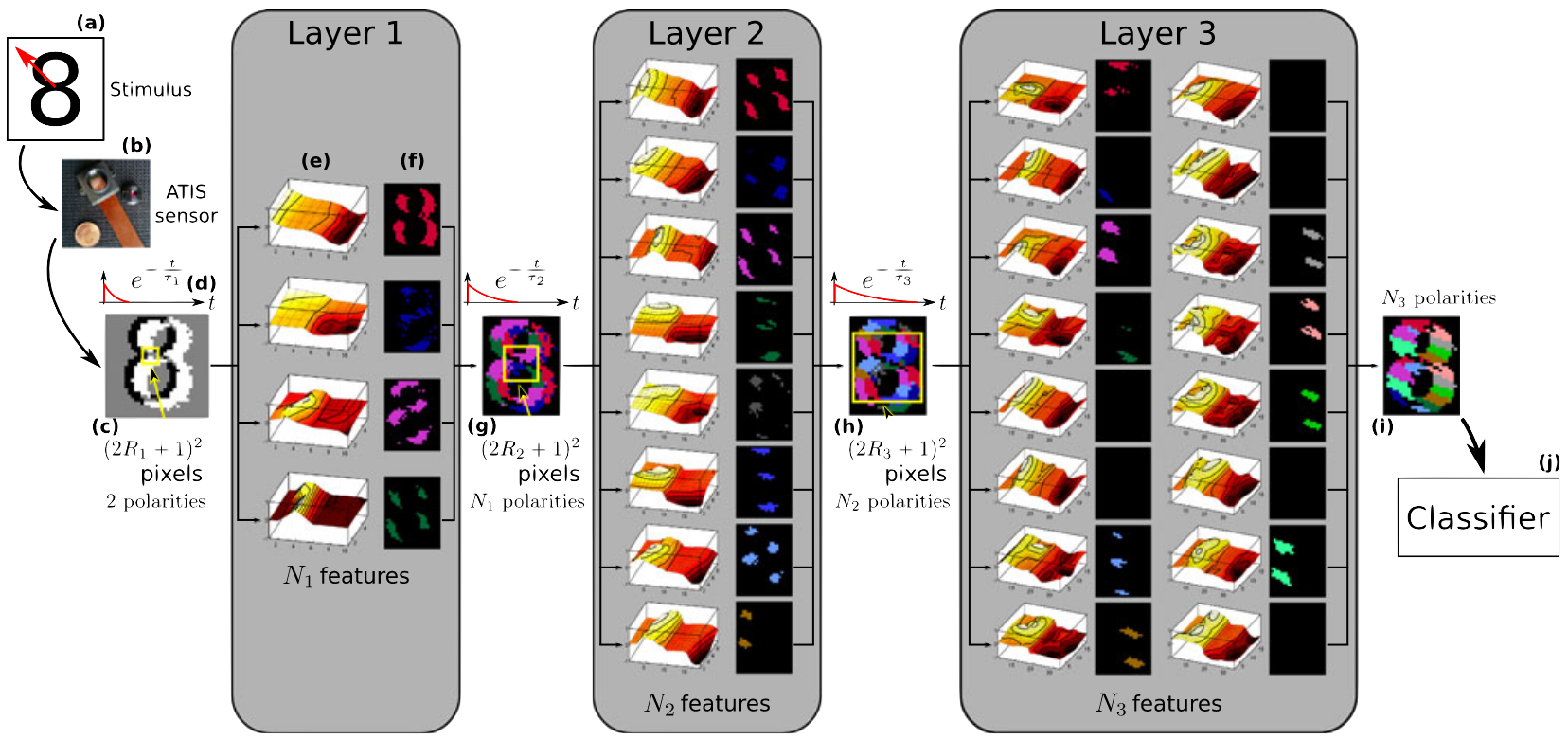
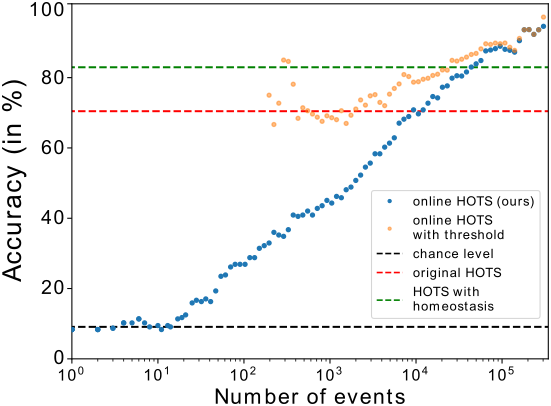
We propose a neuromimetic architecture able to perform always-on pattern recognition. To achieve this, we extended an existing event-based algorithm [1], which introduced novel spatio-temporal features as a Hierarchy Of Time-Surfaces (HOTS). Built from asynchronous events acquired by a neuromorphic camera, these time surfaces allow to code the local dynamics of a visual scene and to create an efficient event-based pattern recognition architecture. Inspired by neuroscience, we extended this method to increase its performance. Our first contribution was to add a homeostatic gain control on the activity of neurons to improve the learning of spatio-temporal patterns [2]. A second contribution is to draw an analogy between the HOTS algorithm and Spiking Neural Networks (SNN). Following that analogy, our last contribution is to modify the classification layer and remodel the offline pattern categorization method previously used into an online and event-driven one. This classifier uses the spiking output of the network to define novel time surfaces and we then perform online classification with a neuromimetic implementation of a multinomial logistic regression. Not only do these improvements increase consistently the performances of the network, they also make this event-driven pattern recognition algorithm online and bio-realistic. Results were validated on different datasets: DVS barrel [3], Poker-DVS [4] and N-MNIST [5]. We foresee to develop the SNN version of the method and to extend this fully event-driven approach to more naturalistic tasks, notably for always-on, ultra-fast object categorization.
Antoine Grimaldi
Phd candidate in Computational Neuroscience
During my PhD, I am focusing on Ultra-fast vision using Spiking Neural Networks.
Laurent U Perrinet
Researcher in Computational Neuroscience
My research interests include Machine Learning and computational neuroscience applied to Vision.