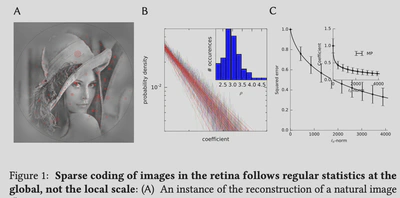
Sparse coding of images in the retina follows regular statistics at the global, not the local scaleSee supplementray code.
PDF Cite DOI URL arXiv
Cite DOI Press URL HAL