Anr-Anr


- sur Radio Canada, par Sonia Lupien : Les neurones de la Joconde : Les neurones de la Joconde (Émission ICI Première • Pénélope - 12 novembre 2024) https://ici.radio-canada.ca/ohdio/premiere/emissions/penelope/segments/rattrapage/1910587/sonia-lupien-neurones-joconde
- https://www.cerveauetpsycho.fr/sd/neurobiologie/le-mystere-de-la-joconde-elucide-par-les-neurosciences-26605.php
- https://www.facebook.com/photo/?fbid=10233017307913043&set=a.2288497170052
- https://neuromatch.social/@laurentperrinet/113027202054980118
- https://www.linkedin.com/posts/laurent-perrinet-1857b9_dans-le-dernier-num%C3%A9ro-de-cerveau-psycho-activity-7233740214886625280-Ivbf



- as was presented at the 32nd International Conference on Artificial Neural Networks (ICANN 2023) in Heraklion (Greece).
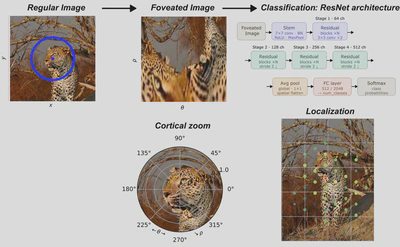
- this proceedings paper follows up the poster presented in :(2023). Retinotopy improves the categorisation and localisation of visual objects in CNNs. In preparation.



as was presented at the Computational Cognitive Neuroscience Society Meeting 2023 in Oxford
see a follow-up presentation in:
(2023). Retinotopy improves the categorisation and localisation of visual objects in CNNs. 32nd International Conference on Artificial Neural Networks (ICANN 2023).