Rick A Adams
Future Leaders Fellow, Institute of Cognitive Neuroscience & Centre for Medical Image Computing, UCL
Collaborative publications
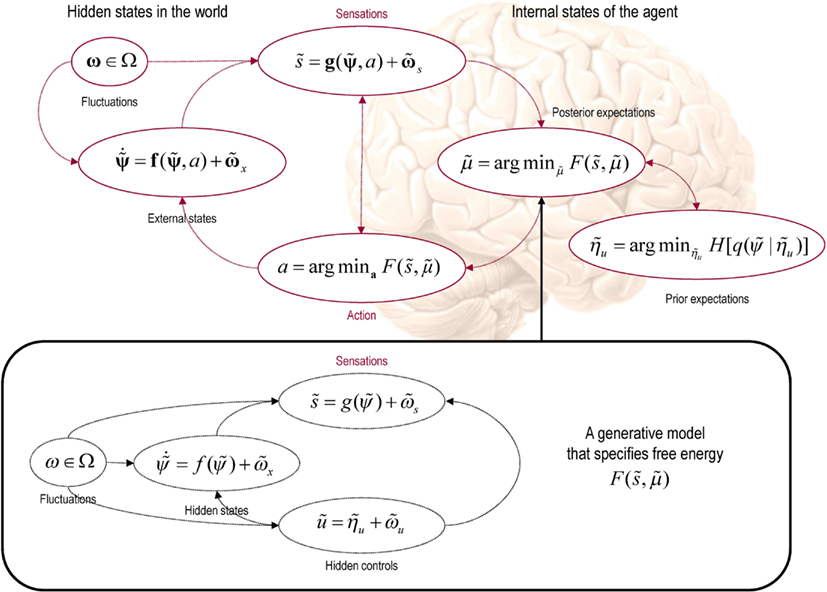
I had the chance to visit the theoretical group of Karl Friston at the Wellcome Trust Centre for Neuroimaging (University College London) from November 2010 to February 2012. During this period we built a series of active‑inference models of eye‑movement control. First, we introduced a generative model of saccadic behaviour Friston et al., 2012. We then extended the framework to clinical populations, demonstrating that neuromodulation may critically shape model predictions in participants with and without schizophrenia (Adams et al., 2012). Finally, we incorporated realistic sensory‑motor transmission delays, providing a more accurate account of the timing of perception‑action cycles Perrinet et al., 2014.
- modelling eye movements using active inference(2012). Perceptions as Hypotheses: Saccades as Experiments. Frontiers in Psychology.
- applying the model to individuals with and without schizophrenia and demonstrating the role of neuromodulation in eye‑movement contro
- extending the framework to incorporate sensory‑motor delays(2014). Active inference, eye movements and oculomotor delays. Biological Cybernetics.